Chuẩn bị: Một đồng hồ vạn năng với 2 que đo, để đồng hồ thang x1KΩ, kiểm tra dây đo còn tốt, dụng cụ kẹp linh kiện cố định hay miếng lót cách điện.
Trước khi đo Mosfet – FET (FET) dùng dây dẫn hay tô vít nối tắt 3 chân của MosFet – FET lại để khử hết điện tích trên các chân (lý do FET là linh kiện rất nhạy cảm, điện tích trên các chân có thể ảnh hưởng đến kết quả đo)
Trước khi đo Mosfet – FET (FET) dùng dây dẫn hay tô vít nối tắt 3 chân của MosFet – FET lại để khử hết điện tích trên các chân (lý do FET là linh kiện rất nhạy cảm, điện tích trên các chân có thể ảnh hưởng đến kết quả đo)
1. Mosfet – Fet còn tốt thì kết quả đo sẽ như sau:
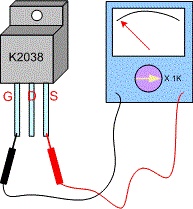
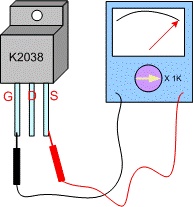
B1: Đo giữa G và S cả hai chiều kim không lên (tiếp giáp GS chưa bị thủng)
B2. Đo giữa G và D cả hai chiều kim không lên ( tiếp giáp G D chưa bị thủng)
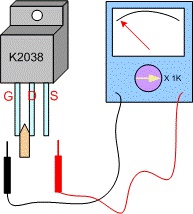
B3. Dùng Tô vít nối tắt G vào D để thoát điện tích trên cực G (do quá trình đo đã để lại điện tích trên chân G)
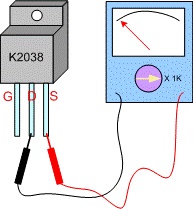
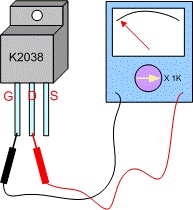
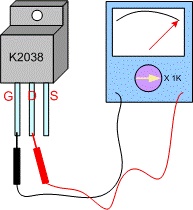
B4. Đo giữa D và S (Sau khi G đã thoát điện cực G thì ) có một chiều kim không lên (có đảo que đo)
2. Các trường hợp sau là Mosfet – Fet bị hỏng
Đo giữa G và S kim lên => là chập G S
Đo giữa G và D kim lên là chập G D
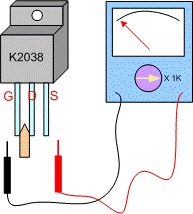
Dùng tô vít chập chân G D để thoát điện tích chân G,
Đo giữa D và S kim vẫn lên sau khi đã thoát điện cực G là bị chập DS
3. Các đo nhanh và xem khả năng mở kênh của Mostfet – Fet
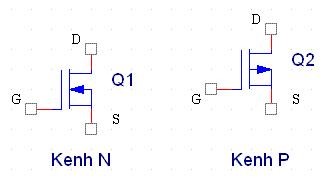
Kiểm tra Mosfet – Fet kênh N.
1. Đặt thang x10K, đặt FET lên vật cách điện hay kẹp chặt bằng dụng cụ không dẫn điện.
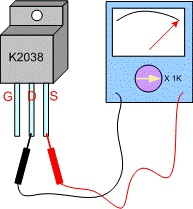
2. Đặt que đỏ vào cực S, que đen vào cực D, thông thường VOM sẽ chỉ một giá trị nào đó (do điện tích còn tồn tại trên chân G làm mở)
3. Giữ que đo như ở bước 2, chạm ngón tay từ cực G sang cực D sẽ thấy kim nhíc lên (thường gần bằng 0), chạm tay từ G sang S sẽ thấy kim tụt đi (có trường hợp tụt gần về vô cùng). Để thấy kim thay đổi nhiều hơn thì hay để ngón tay chạm dính nước hoặc chạm vào đầu lưỡi vào cực G.
Đó là FET còn sống, nếu ko có thay đổi là FET chết.
1. Đặt thang x10K, đặt FET lên vật cách điện hay kẹp chặt bằng dụng cụ không dẫn điện.
2. Đặt que đỏ vào cực S, que đen vào cực D, thông thường VOM sẽ chỉ một giá trị nào đó (do điện tích còn tồn tại trên chân G làm mở)
3. Giữ que đo như ở bước 2, chạm ngón tay từ cực G sang cực D sẽ thấy kim nhíc lên (thường gần bằng 0), chạm tay từ G sang S sẽ thấy kim tụt đi (có trường hợp tụt gần về vô cùng). Để thấy kim thay đổi nhiều hơn thì hay để ngón tay chạm dính nước hoặc chạm vào đầu lưỡi vào cực G.
Đó là FET còn sống, nếu ko có thay đổi là FET chết.
Kiểm tra Mosfet – Fet kênh P.
Với FET kênh P cách làm tương tự nhưng cần đảo que đo.
Với FET kênh P cách làm tương tự nhưng cần đảo que đo.